






















































泡の取り扱い: 液体表面の泡は、急激な変動を引き起こし、レベルの測定値を歪める可能性があります。液面トランスミッターは、これらの影響を軽減するために高度なフィルタリング技術を採用しています。トランスミッターは瞬間的な読み取り値に依存するのではなく、時間の経過に伴う複数の測定値を平均します。この平均化プロセスにより、泡によって引き起こされる急激な変化が平滑化され、泡層の下の実際の液体レベルがより安定して正確に表示されます。さらに、一部の送信機は調整可能なフィルタリングパラメータを備えており、オペレータがさまざまな泡密度や撹拌レベルに対する応答を微調整することができます。
乱流補正: 液体内の乱流は、従来のセンサーが液面の変化として解釈する不規則な表面の動きを引き起こす可能性があります。高度な液面トランスミッターは、複雑なアルゴリズムを利用して、乱流による外乱と実際の液面変化を区別します。これらの送信機は、表面の動きのパターンと頻度を分析することで、乱流条件にもかかわらず、正確に液体レベルを識別し、報告することができます。この機能によりプロセスの信頼性が向上し、制御システムが効果的な動作のための正確なデータを確実に受信できるようになります。
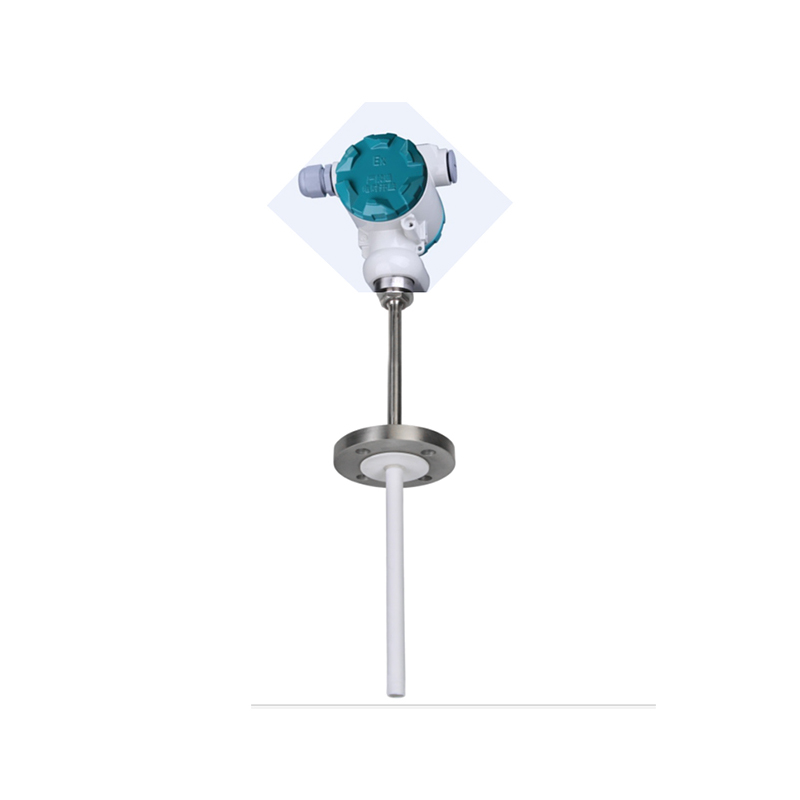
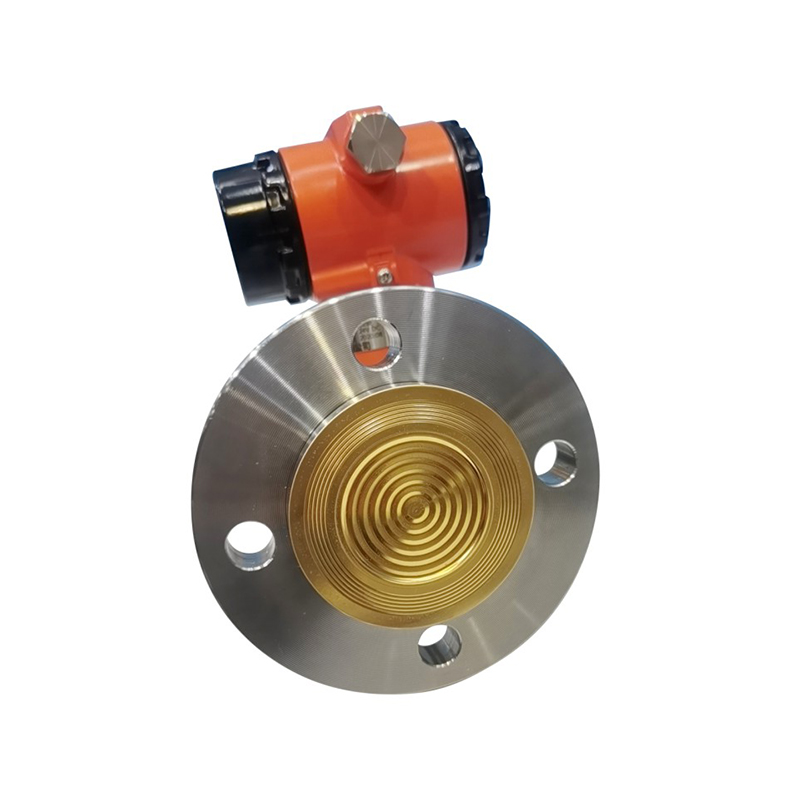
センサー技術: センサー技術の選択は、泡や乱流を処理する送信機の能力に大きな影響を与えます。たとえば、導波レーダー (GWR) や超音波センサーは、表面の外乱に対する耐性が高いため広く好まれています。 GWR 送信機は、液体に浸されたプローブに沿ってマイクロ波パルスを放射します。これらのパルスは影響を受けずに発泡層を通過し、液体表面で反射するため、表面状態に関係なく信頼性の高い測定が可能になります。一方、超音波センサーは、音波が液体表面から反射するのにかかる時間を測定することによって液体レベルを計算します。この方法は泡の干渉や乱流の動きに対しても堅牢であるため、どちらの技術も厳しい産業環境に適しています。
設置に関する考慮事項: 適切な設置は、液面測定における泡や乱流の影響を最小限に抑える上で重要な役割を果たします。センサーは、泡の蓄積が最小限に抑えられるエリア、または容器内の乱流ゾーンから離れたエリアに戦略的に配置する必要があります。センサーを最適な高さに取り付けることで、フォーム層の下の液体レベルを一貫して検出できるようになります。一部のトランスミッタは、さまざまな容器構成に対応する柔軟な取り付けオプションとプローブ長を提供し、複雑な環境での測定精度をさらに高めます。
校正とセットアップ: 定期的な校正は、特に泡や乱流が発生しやすい環境において、液面トランスミッターの正確な性能を維持するために不可欠です。校正手順により、トランスミッタがセンサー信号を正しく解釈し、測定精度に影響を与える環境要因を補償できるようになります。オペレータは校正設定を調整して、泡密度、乱流強度、およびアプリケーションに固有のその他の変数に対する送信機の応答を最適化できます。適切なセットアップには、運用要件に合わせて送信機のフィルタリング パラメータ、感度設定、応答時間を構成し、困難な条件下でも信頼性の高いパフォーマンスを確保することが含まれます。






発信器")

発信器")







